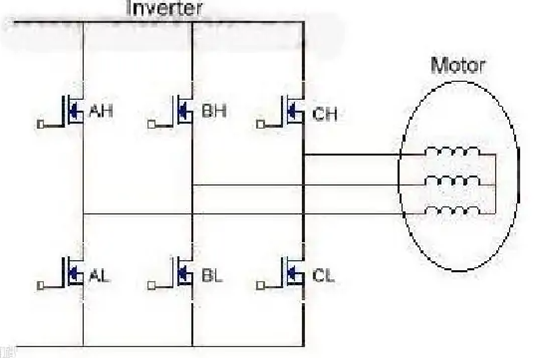
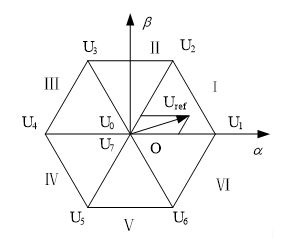
There are eight switching modes for three-phase full bridge inverter, which correspond to eight basic voltage space vectors U0~U7 respectively. U0 and U7 are zero vectors and located at the origin. The other six non-zero vectors have the same amplitude, and the interval between adjacent vectors is 60 °. The space is divided into six sectors according to the location of the non-zero vector. Space vector pulse width modulation is to use different combinations of U0~U7 to form a reference voltage vector Uref with the same amplitude and different phases, so as to make the vector track approach the reference circle as much as possible.
Fig. 3 Distribution of basic space vector in space
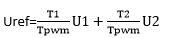
Figure 4 shows that the reference voltage is in the first sector, and there are two non-zero vectors U1U2 and zero vectors combined. When the reference voltage enters the next sector, the new two adjacent vectors and zero vectors are combined. Based on the vector synthesis rule, under the condition that T1+T2 "=Tpwm" is met, and V1 and V2 are required to be able to synthesize vectors at any angle, so Uref_max=√ 3/2 Udc. Modulation M=Uref/(Uref_max)=Uref/(√ 3/2 Udc).
Fig. 4 Vector Synthesis Method of Reference Voltage in the First Sector
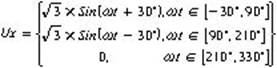
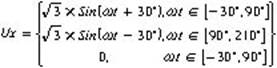
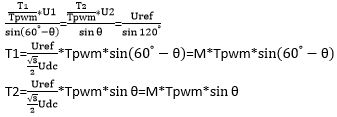
According to the triangle sine theorem:
θ The angle calculation method is the same as that in the previous SPWM. In order to reduce trigonometric function calculation, Sin trigonometric function table is also used in the code to obtain the best harmonic performance and minimum switching loss. At present, there are mainly 7-segment and 5-segment space vector synthesis methods.
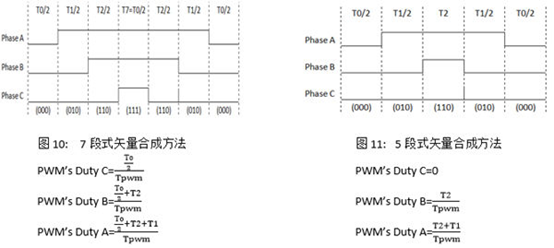
Compared with 7-segment and 5-segment, there is a big difference in the distribution of zero vectors between them. In a single PWM cycle, the 5-segment method inserts zero vectors centrally in the middle, causing large torque ripple, which will lead to obvious walk stop instability at low frequencies. In the 7-segment method, half of the zero vectors are inserted in the middle of the PWM cycle, and the other half are inserted on both sides of the PWM cycle, which can make the operation of the flux linkage more stable, Reduce the torque ripple of the motor, so that the low frequency characteristics are obviously better than the 5-segment type, and the high frequency characteristics have little difference. However, in each PWM cycle of the 5-segment method, there is always a phase bridge arm whose switch tube state does not need to be changed. In the 7-segment method, the switch tube of each phase bridge arm needs to be switched once. The switching times of the 5-segment method are 1/3 less than those of the 7-segment method, so the switching power consumption of the 5-segment method is the minimum. In general, when the PWM cycle reaches above 10KHz, the 5-segment type is more appropriate.
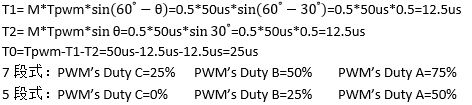
Example: Angle θ= 30 °, torque percentage M=50%, PWM frequency 20KHz, calculate the duty cycle of each three-phase PWM.
The above is a brief introduction to the sine wave control of DC brushless motor.




 Service mailbox
Service mailbox 13823783658
13823783658 ChatNow
ChatNow