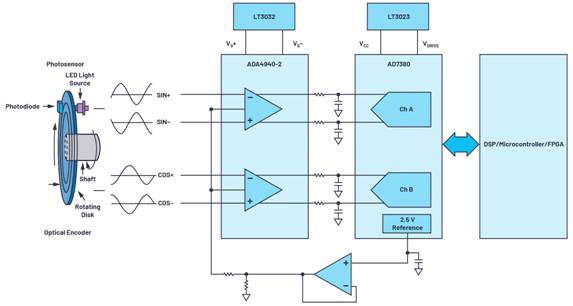
Figure 4 shows an example of an optimized optical encoder position feedback system. The circuit can be connected to a type of optical encoder, where the differential sine and cosine signals from the encoder can be captured by the circuit. Figure 4 shows the ADA4940-2 front-end, dual-channel, full-differential amplifier that drives the ADC. In this case, the AD7380 is a dual-channel, 16-bit, full-differential, 4 MSPS, synchronous sampling SAR ADC, which is packaged in a small size of 3 mm × 3 mm LFCSP package.
Figure 4 Optimized feedback system design. (:Analog Devices, Inc.)
On-chip 2.5 V reference will allow the component requirements of the circuit. The VCC and VDRIVE of ADC and the power rail of amplifier driver can be powered by LDO regulator, such as LT3023 and LT3032. When connecting these reference designs - for example, using a 1024 slot optical encoder, the sine and cosine of 1024 cycles are generated when the encoder disk rotates for one turn - the 16-bit AD7380 samples each encoder slot with 216 codes, which increases the overall encoder resolution by up to 26 bits.
4 The MSPS throughput ensures that the detailed sine and cosine cycles are captured and the encoder position is correct. High throughput can realize on-chip oversampling, thus reducing the time loss of digital ASIC or microcontroller providing encoder position to the motor. On-chip oversampling allows an additional 2-bit resolution, which can be used with the on-chip resolution enhancement function. Resolution improvement can further improve the accuracy of up to 28 bits.
The motor control system requires higher precision, higher speed and miniaturization. The optical encoder is used as the motor position sensing device. Therefore, the optical encoder signal chain must have high accuracy when measuring the motor position. High-speed and high-throughput ADC can accurately capture information and feed motor position data to the controller, thus achieving a higher level of accuracy and optimization in the position feedback system.

 Service mailbox
Service mailbox 13823783658
13823783658 ChatNow
ChatNow